 製品検索
製品検索
 はんだ付けシステム
はんだ付けシステム はんだこて
はんだこて こて先
こて先 自動はんだ送り装置
自動はんだ送り装置 測定器/こて先温度計
測定器/こて先温度計 はんだ槽
はんだ槽 表面実装/SMT関連
表面実装/SMT関連 はんだ除去
はんだ除去 作業環境/材料
作業環境/材料 はんだ/ケミカル
はんだ/ケミカル 熱加工
熱加工 作業用工具
作業用工具 修理/サービス
修理/サービス その他
その他





FA-1100シリーズ
FA-1100ユニット搭載モデル(150W)
現場のニーズを反映させた新モデル
| 希望小売価格 | オープン |
|---|---|
| JANコード | |
| 内容 |
FA-1100シリーズの特長
- 正確なこて先温度とランニングコストの両立を可能とする150Wヒーター一体型こて先を採用。 センサーを小型にすることで、ヒーターからの直接の熱による影響を排除。
- ヒーターをコイル状に隙間なく巻き、小型センサーもこて先先端近くに配置することで立ち上がり時間とこて先の熱回復時間を大幅に短縮。
- こて先自社生産によりニーズに合わせた柔軟な作製対応が可能。
- N2ガスにも対応可能。
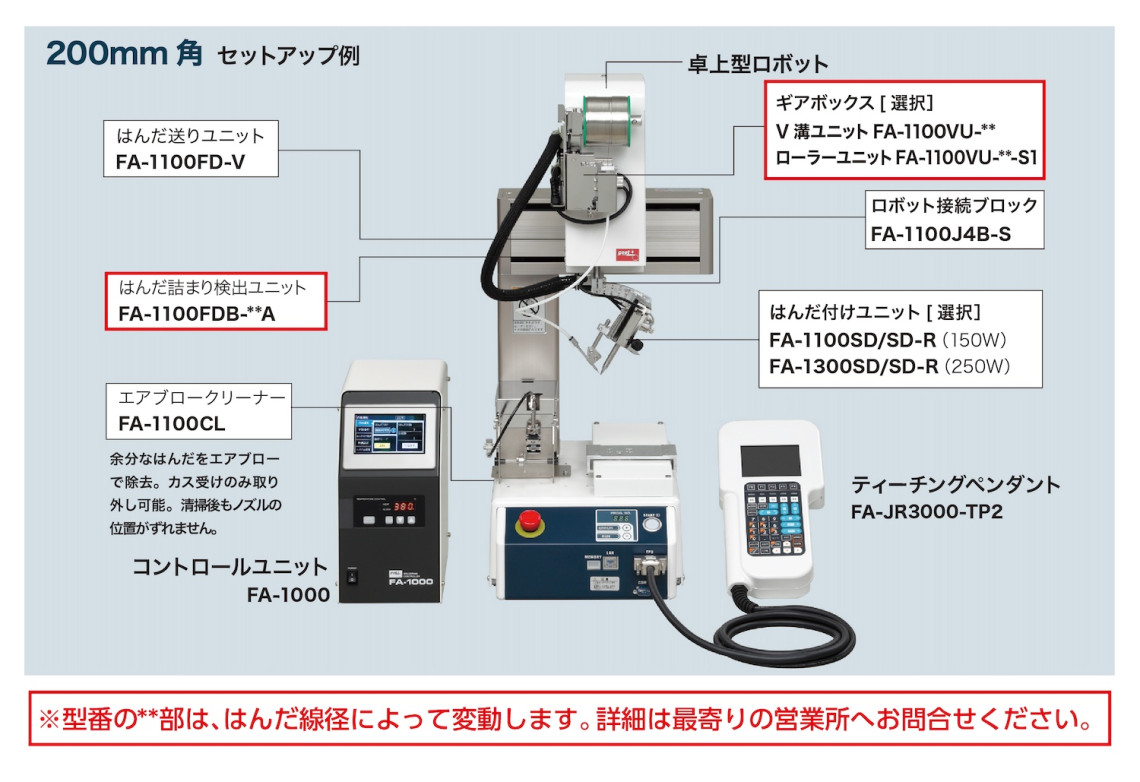
200mm角 セッティングイメージ
セッティング例です。
※図中 型番の**部は、はんだ線径によって変動します。詳しくはお近くの営業所までお問い合わせください。
300mm/400mm/500mm角 セッティングイメージ
セッティング例です。
※図中 型番の**部は、はんだ線径によって変動します。詳しくはお近くの営業所までお問い合わせください。

進化したはんだ付けシステム
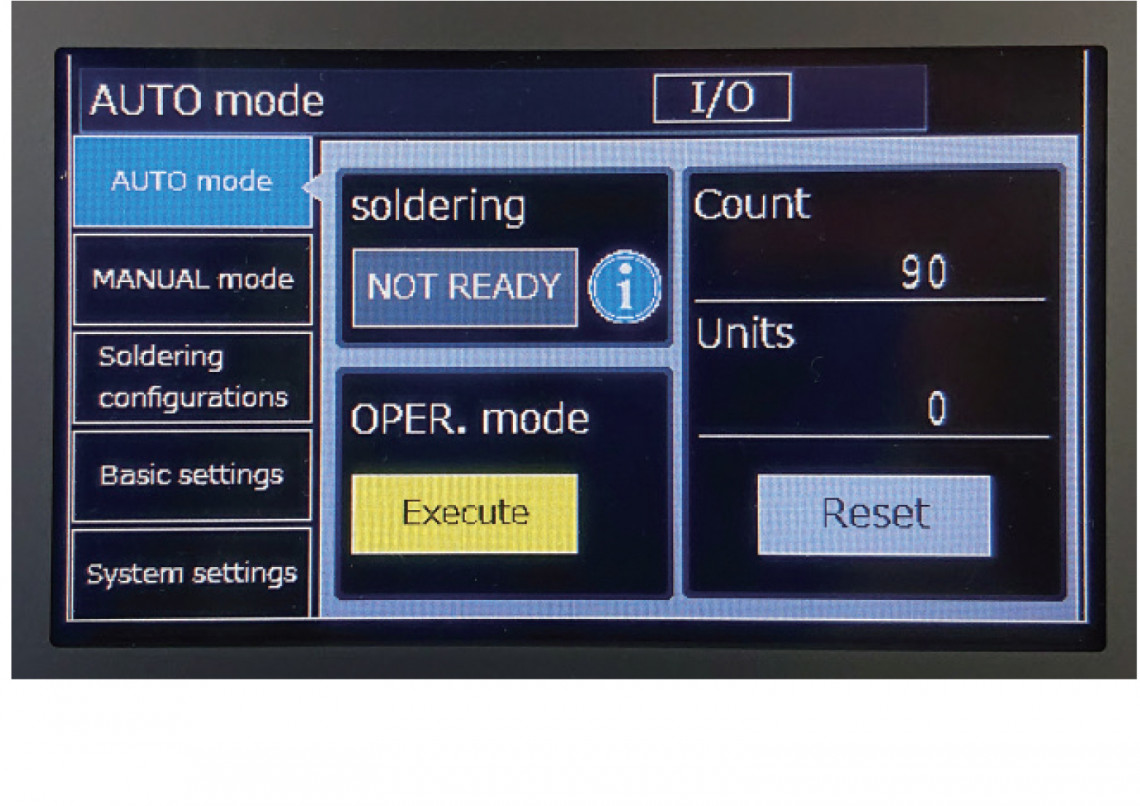
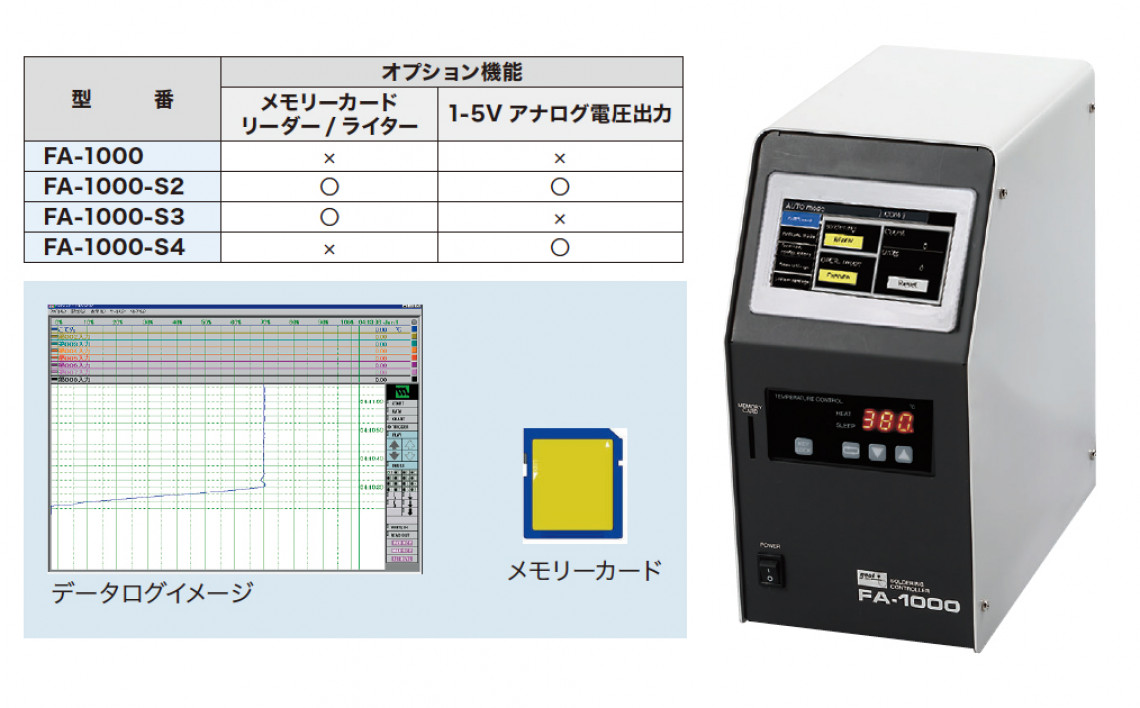
■コントロールユニット FA-1000
各ユニットを制御可能な高性能コントロールユニット。
・はんだ付け条件を256通り登録可能。
・大画面のカラータッチパネルを採用し、視認性 / 操作性が向上。
・日本語、英語、中国語、スペイン語に対応。
・I/Oコネクタを標準装備。様々なロボットと接続可能。
・オプションで増設できるメモリーカード機能と、こて先温度モニター出力機能。
〈オプション機能について〉
・メモリーカード機能
登録したはんだ付け条件をメモリーカードに保存できます。データを複数台へのコピーに便利です。
・こて先温度モニター出力
こて先温度を1–5Vのアナログ電圧に変換して出力します。市販のデータロガーに繋げることで温度管理に役立ちます。
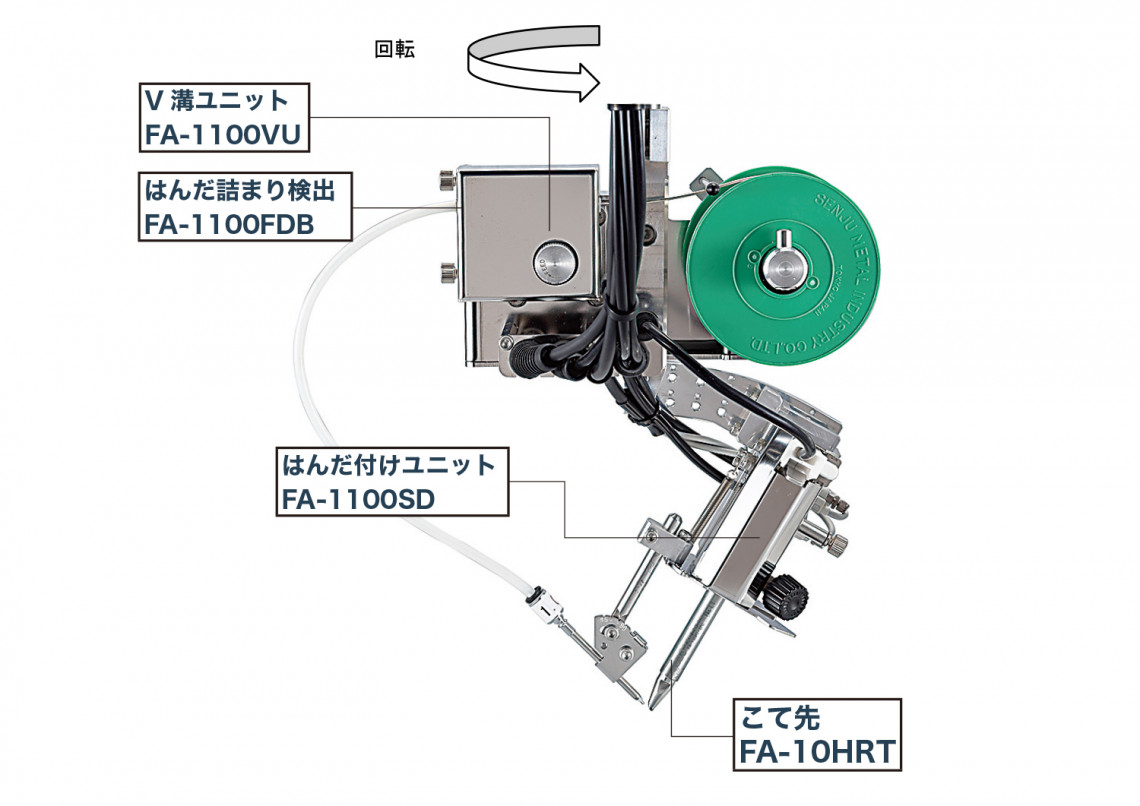
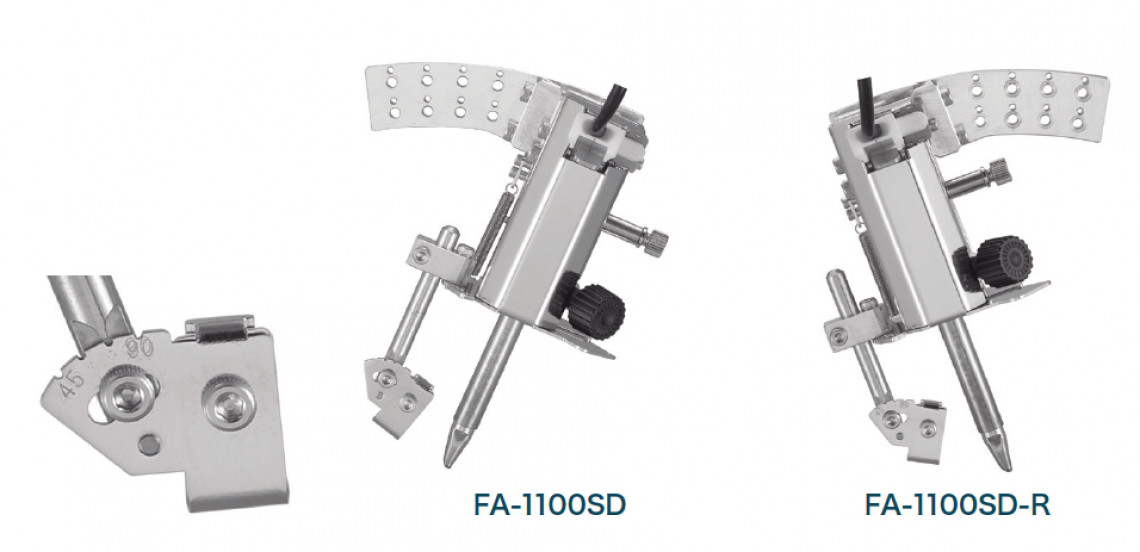
■はんだ付けユニット FA-1100SD/FA-1100SD-R
・軽量コンパクトでロボットや装置への組み付けが簡単。
・370g以下のため、500g可搬の非力なロボットにも取り付け可能。
・はんだ供給ノズルの角度がわかるメモリ付きの保持部。(45–90°)
・はんだ供給方向を±30°の斜めへ変更可能。
・新設計のこて先脱着機構で、より簡単なこて先交換。(PAT.P)
・角度調整板を逆に取付けたモデルも選択可能。(出荷時に選択)
こて先をはんだ付け対象に被せる使い方が可能。
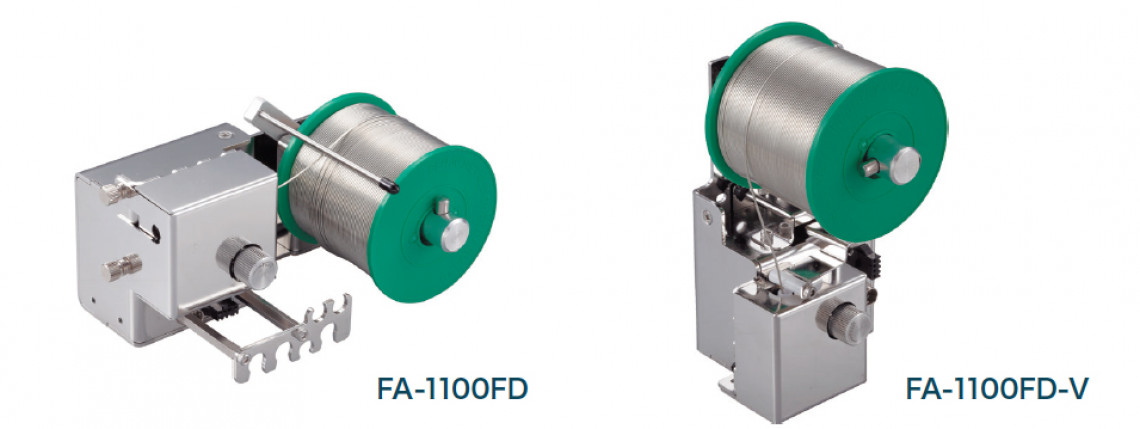
■はんだ送りユニット FA-1100FD/FA-1100FD-V
・リールホルダー / 送り部を一体化したコンパクト設計。
・ステッピングモーターによる高度な送り管理。
・はんだ詰まりセンサー / はんだ切れセンサーも内蔵。
・ワンタッチではんだ交換可能。
・横置き・縦置きに合わせた独自のセンサー設計。
・他社ロボットを使用して自動機構築にもおすすめ。
| 適合ロボット | FA-3204A | FA-3304A / FA-3404A |
| 型番 | FA-1100FD-V | FA-1100FD |
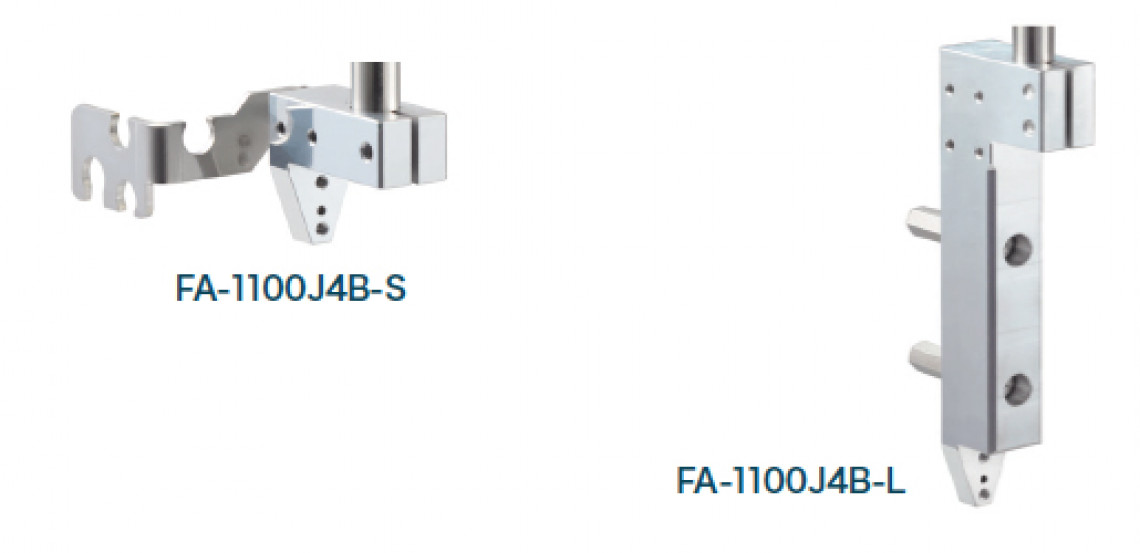
■ロボット接続ブロック FA-1100J4B-S/FA-1100J4B-L
・ロボットとはんだ付けユニット(FA-1100SD/FA-1100SD-R)を接続します。
・軸径Φ10のロボットと接続できます。
・FA-1100J4B-Lには、はんだ送りユニット(FA-1100FD)を取り付けられます。
| 適合ロボット | FA-3204A | FA-3304A / FA-3404A |
| 型番 | FA-1100J4B-S | FA-1100J4B-L |
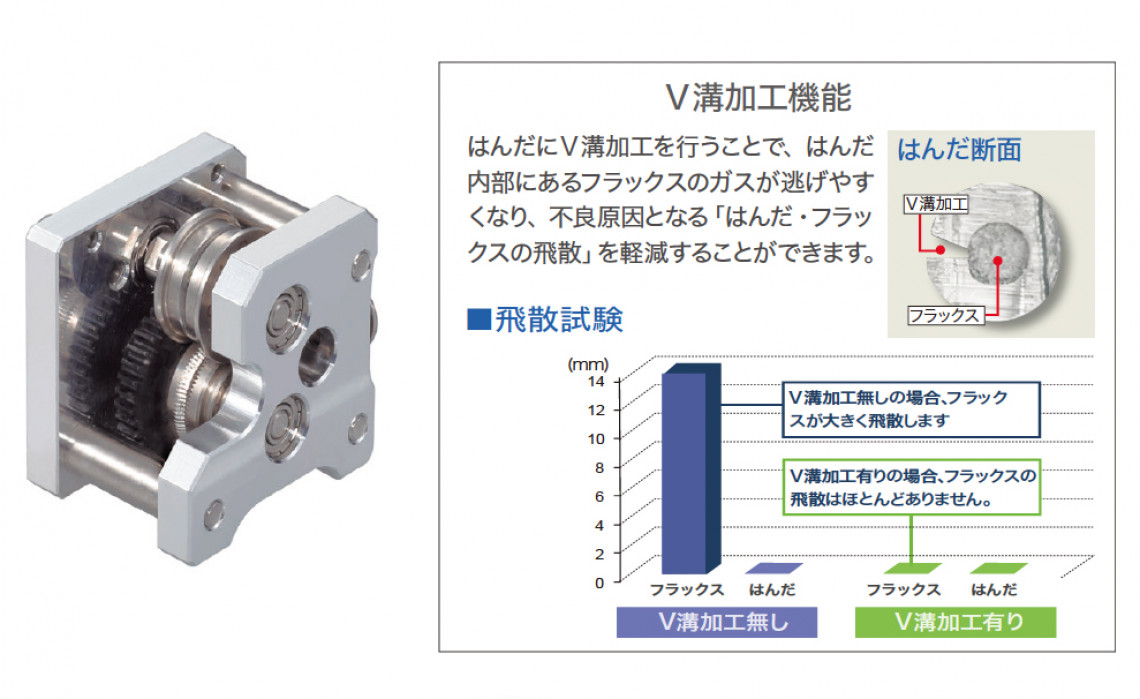
■V溝ユニット FA-1100VU
・はんだにV溝加工しながら送り出す交換式ギアボックス。
・はんだのスリップを防ぐ縦溝加工ローラー採用。
・はんだにV溝加工を行うことで、はんだ内部のフラックスガスが逃げやすくなり、不良原因となる「はんだ・フラックスの飛散」を軽減することができます。
| 型番 | 適合はんだ径 |
| FA-1100VU-05 | Φ0.5 |
| FA-1100VU-06 | Φ0.6(Φ0.65) |
| FA-1100VU-08 | Φ0.8 |
| FA-1100VU-10 | Φ1.0 |
| FA-1100VU-12 | Φ1.2 |
■はんだ詰まり検出ブロック FA-1100FDB
・はんだ詰まりを検出。はんだが詰まった状態での作業を防止( FA-1000併用時)
・ワンタッチ継手ノズル採用で設置/メンテナンスが簡単。
・ノズルストレート部を長くし、はんだ直進性を改善。
・こて先とノズル先端の距離も簡単に調整可能。
| 適合ロボット | FA-3204A | FA-3304A / FA-3404A | 適合はんだ径 |
| 型番 | FA-1100FDB-05A | FA-1100FDB-05B | Φ0.5 |
| FA-1100FDB-06A | FA-1100FDB-06B | Φ0.6(Φ0.65) | |
| FA-1100FDB-08A | FA-1100FDB-08B | Φ0.8 | |
| FA-1100FDB-10A | FA-1100FDB-10B | Φ1.0 | |
| FA-1100FDB-12A | FA-1100FDB-12B | Φ1.2 | |
| 長さ | 450mm | 300mm |

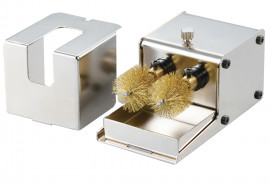
■エアブロークリーナー FA-1100CL
・こて先の余分なはんだを除去するエアブロークリーナー。
・容積を従来比1.6倍にUP、吹き上がり防止板を内部に設置することではんだ飛散を大幅に軽減。
・清掃/メンテナンスが非常に簡単な構造。ワンタッチでカス受けの取り外しが可能。
・ブローノズルに角度目盛が付属。数値管理が可能に。

■スライドユニット FA-1100SL
・エア駆動ではんだ付けユニット(FA-1100SD / FA-1100SD-R)を上下ストロークできるユニット。
・端子に対して斜めからこて先を当てられるようになり、端子にこて先が乗り上げてしまうのを防ぎます。
上下限検出センサー付。ストローク長:8mm

ティーチングペンダント
FA-JR3000-TP2
感覚的に座標設定のできるティーチングペンダント。対話式の簡単ティーチングが可能です。

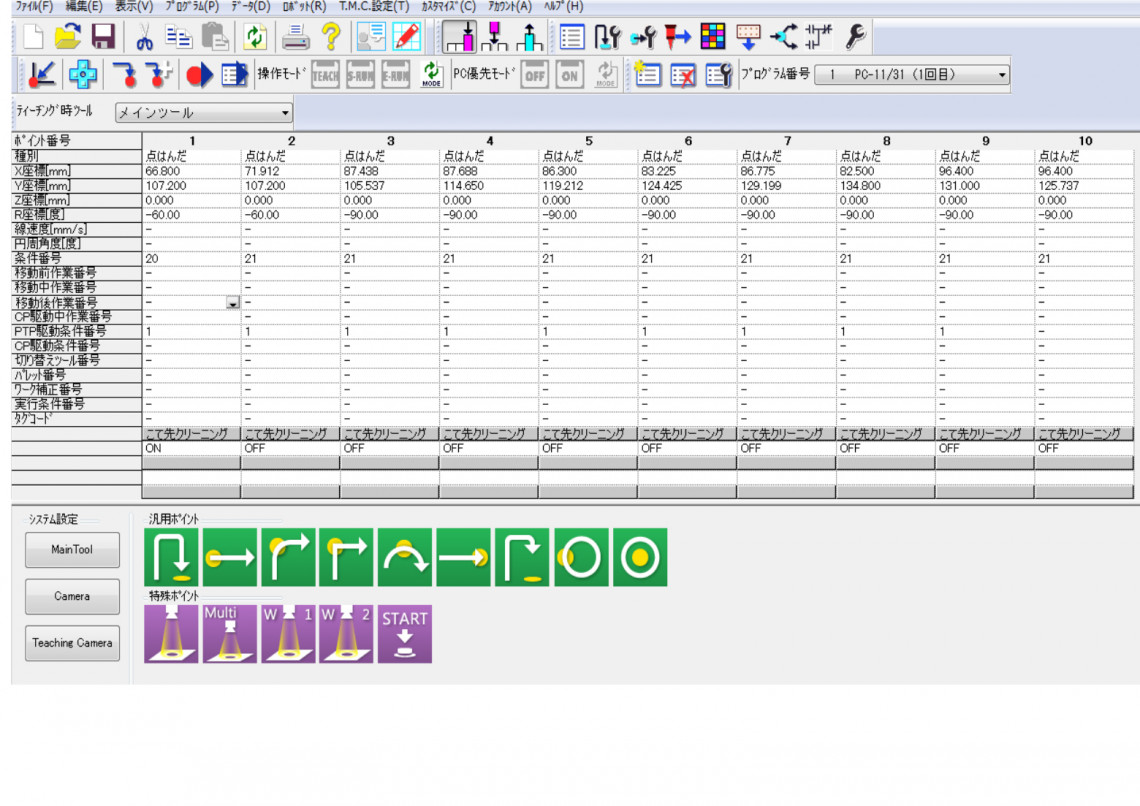
PCソフト
FA-JR3000-PC2
ティーチングデータやカスタマイズデータの作成・編集や保存をパソコン上で行うアプリケーション用ソフトです。
※データの送受信と保存のみを行える機能限定版ソフトは標準で付属しています。
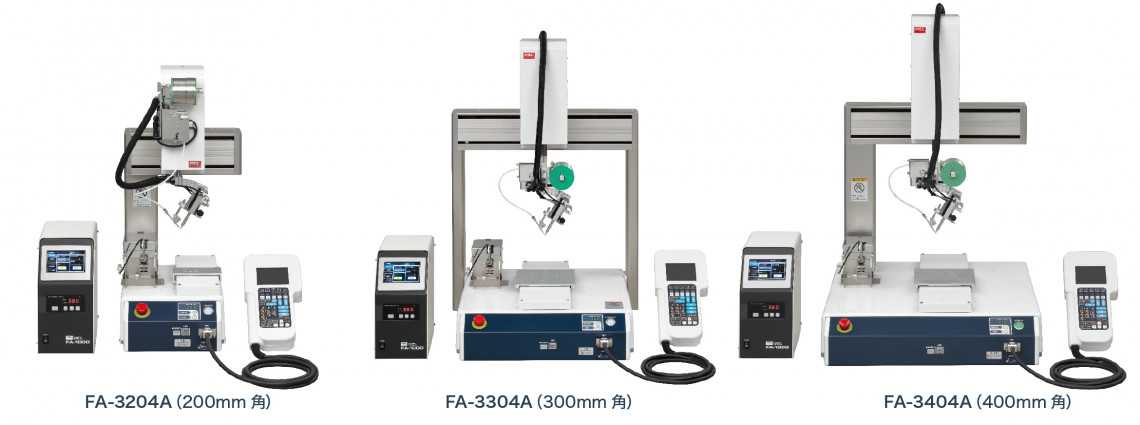
当社卓上型ロボット装着例
- はんだ付け専用プログラムによる簡単ティーチング。
- 操作しやすいティーチングペンダント
- 999のプログラム登録が可能。
- LAN、MEMORYポートでデータ出力可能。(オプションのPCソフトが必要)
お客さまのワークに合わせた様々なカスタマイズも可能


オプション
■ブラシクリーナー FA-1000BC
エアーブローで落としきれないこて先のフラックス焦げ付きも除去可能。

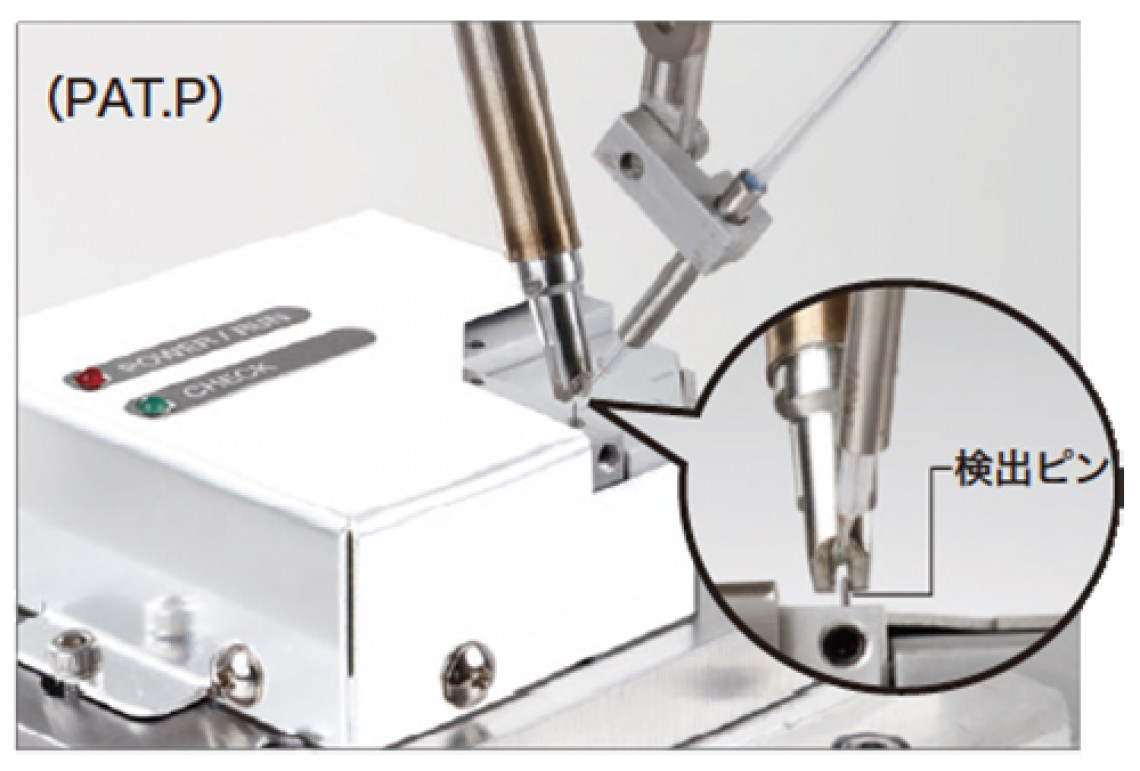
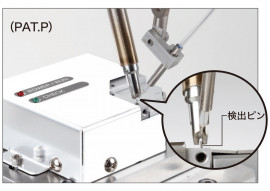
■機械式位置補正ユニット FA-1000TCM
・検出ピンで溝内側の座標を検出/補正
当社独自の検出ピン方式(PAT.P)で従来の補正はもちろん、溝付きこて先内側の座標までも検出/補正できます。小手先の溝を端子に被せて使う場合の位置補正に最適です。
・シンプル、コンパクトなユニット構成
こて先交換時に、位置補正ユニットをセットして専用プログラムを実行するだけで、自動的にこて先位置を補正します。
■N2ノズル FA-1100PH
・はんだ付け部とこて先の酸化防止効果が期待できます。
・はんだのヌレ広がりや切れがよくなります。
適合こて先に装着するだけで、こて先先端からN2ガス(窒素ガス)を出すことができます。
※別途、窒素ガス供給装置が必要となります。

■N2ステーション NC-100R
N2発生器とコントローラーを一体化したコンパクトなN2ステーション。
コンプレッサーなどからの圧縮空気に含まれるN2ガス(窒素ガス)を特殊な分離膜で分離し供給します。

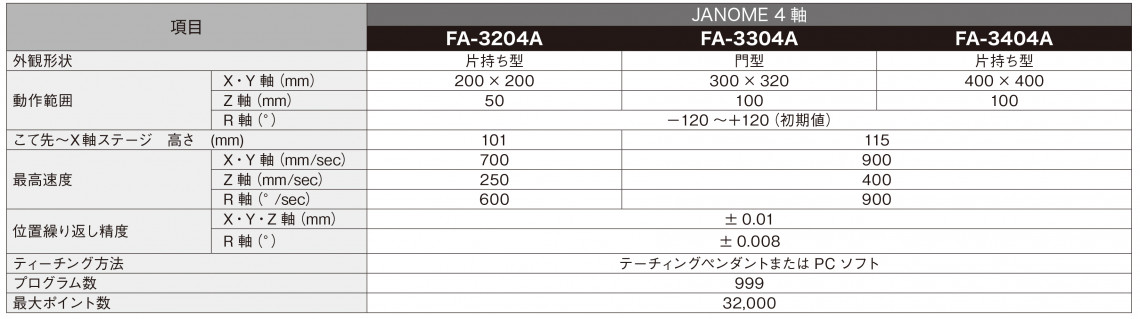
製品仕様
FA-1100システム ロボット基本仕様
| FA-3204A | FA-3304A | FA-3404A | ||
| 軸数 | 標準4軸 追加2軸(オプション) 最大6軸 | |||
| 可動範囲 | X軸 | 200㎜ | 300㎜ | 400㎜ |
| Y軸 | 200㎜ | 320㎜ | 400㎜ | |
| Z軸 | 50㎜ | 100㎜ | 100㎜ | |
| R軸 | ±120°(最大±360°) | ±120°(最大±360°) | ±120°(最大±360°) | |
| 外観形状 | 片持ち型 | 門型 | 片持ち型 | |
| 最大可搬質量(ワーク) | 7㎏ | 15㎏ | 15㎏ | |
| 最高速度(PTP駆動) | X・Y軸 | 700㎜/sec | 900㎜/sec | 900㎜/sec |
| Z軸 | 250㎜/sec | 400㎜/sec | 400㎜/sec | |
| R軸 | 600°/sec | 900°/sec | 900°/sec | |
| 最高速度(CP駆動) | X・Y・Z軸合成 | 600㎜/sec | 850㎜/sec | 850㎜/sec |
| 位置繰返し精度 | X・Y軸 | ±0.01㎜ | ||
| Z軸 | ±0.01㎜ | |||
| R軸 | ±0.008° | |||
| ワークサイズ(最大治具寸法) | 200㎜×145㎜ | 300㎜×275㎜ | 400㎜×355㎜ | |
| 位置教示方法 | リモートティーチング(JOG)/数値入力(MDI) | |||
| ティーチング形態 | ティーチングペンダント(オプション)による直接ティーチング | |||
| PCソフト(オプション)によるオフラインティーチング | ||||
| 画面表示の切り替え | 単位 | mm、inch | ||
| 言語 | 日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、 韓国語、中国語(簡体字、繁体字)、チェコ語、ベトナム語 |
|||
| プログラム数 | 999プログラム | |||
| ポイント記憶容量 | 最大32000ポイント | |||
| 外部入出力 | I/O-SYS(標準搭載) | 入力16点/出力16点 | ||
| I/O-1(標準搭載) | 入力8点/出力8点(※リレー出力4点を含む)※FA-1000TCM接続用 | |||
| I/O-MT/I/O-S | I/O-MT:外部モーター制御(オプション) | |||
| I/O-S:エリアセンサー等インターロック装置の接続用(オプション) | ||||
| COM1(標準搭載) | RC-232C(外部機器制御用、COMコマンド) | |||
| COM2(標準搭載) | RC-232C(外部機器制御用)※FA-1000との接続用 | |||
| COM3(標準搭載) | RC-232C(外部機器制御用) | |||
| MEMORY(標準搭載) | USBメモリ接続用 | |||
| LAN(標準搭載) | イーサネット(10BASE-T/100BASE-TX)を介したパソコン接続用 | |||
| (制御コマンドによるロボットの制御、PCソフトとの接続) | ||||
| 簡易PLC機能 | 最大100プログラム、最大1000ステップ/1プログラム | |||
| 駆動方式 | 5相パルスモーター駆動 | |||
| 制御方式 | PTP(Point to Point)制御/CP(Continuous Path)制御 | |||
| 補間機能 | 3次元直線補間 | |||
| 電源 | AC100–120V (単相) | |||
| AC220–240V (単相) | ||||
| 消費電力 | 200W | |||
| 使用環境 | 使用温度 | 0–40℃ | ||
| 相対湿度 | 20–90%(結露なきこと) | |||
| 標高 | 1,000m以下 | |||
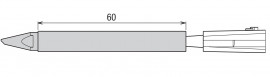
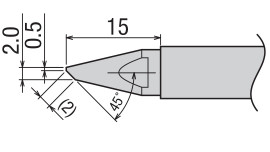
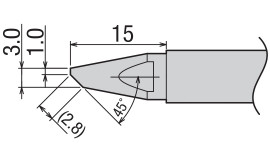
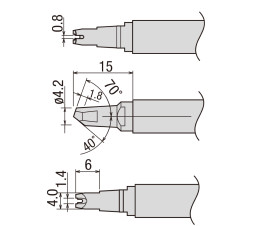
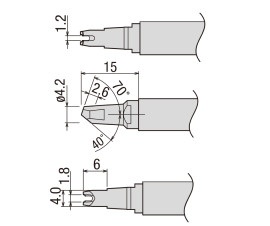
こて先全体図
FA-10HRTシリーズ 全体図
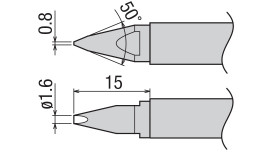
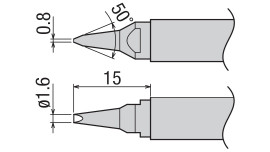
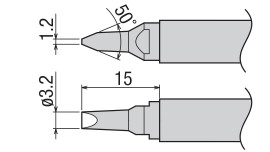
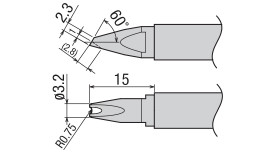
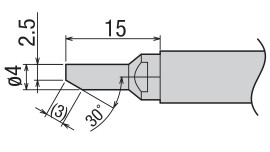
替えこて先
FA-10HRT-1.6D
 オープン価格
オープン価格
FA-10HRT-2.4D
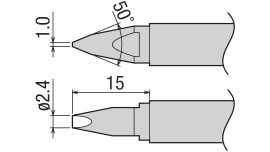 オープン価格
オープン価格
FA-10HRT-3.2D
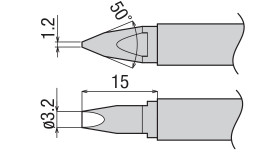 オープン価格
オープン価格
FA-10HRT-1.6SD
 オープン価格
オープン価格
FA-10HRT-3.2SD
 オープン価格
オープン価格
FA-10HRT-3.2DV
 オープン価格
オープン価格
FA-10HRT-4C
 オープン価格
オープン価格
FA-10HRT-2PC
 オープン価格
オープン価格
FA-10HRT-3PC
 オープン価格
オープン価格
FA-10HRT-0.8W
 オープン価格
オープン価格
FA-10HRT-1.2W
 オープン価格
オープン価格
-
ブラシクリーナー
エアーブローで落としきれないこて先のフラックス焦げ付きも除去可能。
FA-1000BC
オープン価格
-
機械式位置補正ユニット
こて先交換時、位置補正ユニットをセットし専用プログラムを実行するだけで自動でこて先位置を補正します。
FA-1000TCM
オープン価格
-

替はんだノズルチューブ (3本入り)
FA-1100N
オープン価格
-

N2ノズル(FA-10HRT専用)
適合こて先に装着し、こて先先端からN2ガス(窒素ガス)を出します。 ※別途窒素ガス供給装置が必要となります。
FA-1100PH
オープン価格
-

ブラシクリーナー用替ブラシ (1セット)
FA-1000BU
オープン価格


 FA-1300/1100 シリーズ
FA-1300/1100 シリーズ
 ロボット用ユニット
ロボット用ユニット
 他社ロボット装着例
他社ロボット装着例